空を、走ろう。スカイドライブ
空飛ぶクルマにより、日常的に空を移動できる。
地上を移動するときの渋滞や満員電車、遠回りや乗り換えがなくなり、行きたい所から行きたい所に、素早く楽しく移動できる世界を実現する。
福澤CEOのスペシャルインタビュー
株式会社SkyDrive 福澤知浩CEO -僕らのビジョン-
空飛ぶクルマとは

日本政府の経済産業省製造産業局、国土交通省航空局が事務局を務めた「空の移動革命に向けた官民協議会」(2018年)においては、空飛ぶクルマとは次の3つの機能が備わっている事とされています。
- 電動
- エンジンのものと比べて、部品の点数が少ないため整備が低コストになる事、騒音が小さい事がメリットとなる。
- 自動運転
- これまでの乗り物と比べて、操縦士が不要になるため、誰でも自由に扱えるようになる。
- 垂直離着陸
- 滑走路や舗装された道路などが不要となり、インフラ設備に左右されない発着が可能になることで、より自由な「移動」を実現する。
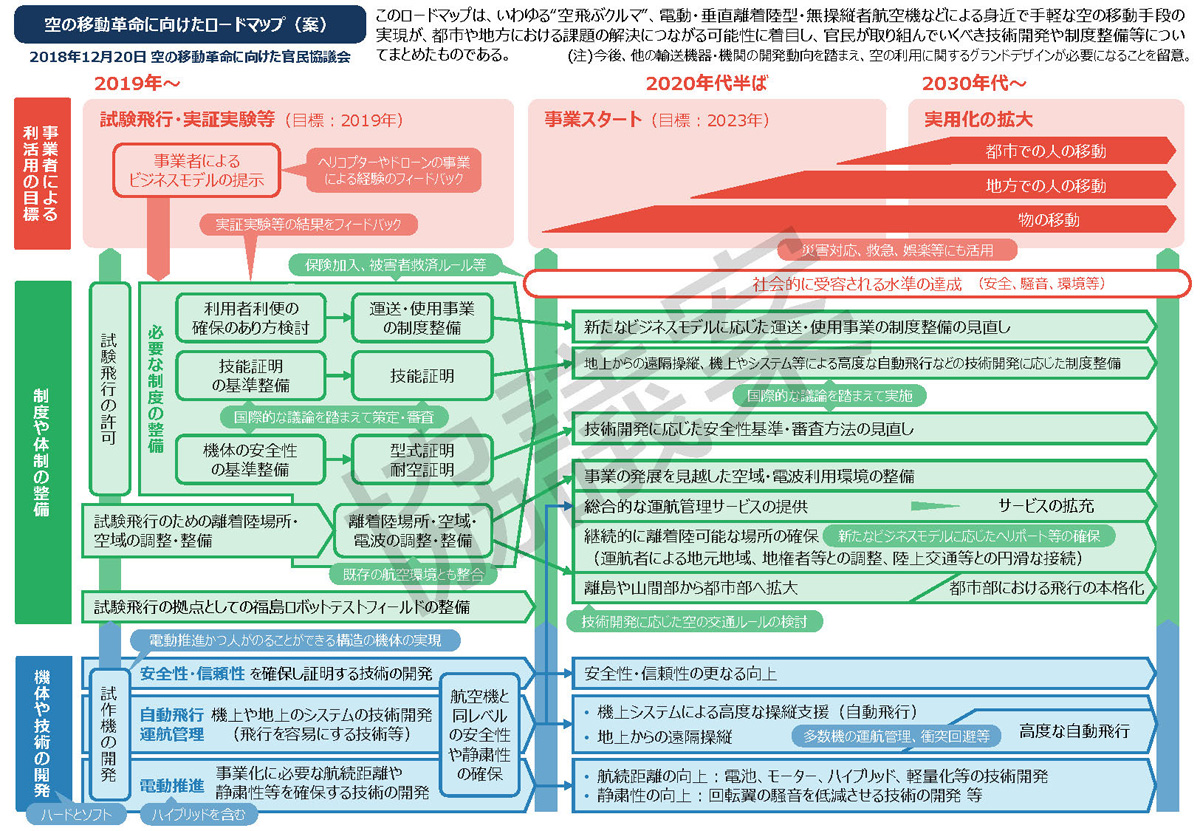
また同年2018年に経済産業省は、国土交通省と合同で、日本における“空飛ぶクルマ”の実現に向けて、官民の関係者が一堂に会する「空の移動革命に向けた官民協議会」を開催し「空の移動革命」にむけてのロードマップをも取りまとめています。また、2019年には「空飛ぶクルマ2023年事業化」が、内閣府の「成長戦略」にも盛り込まれました。
SkyDriveはこの協議会の構成員であり、民間のリーディングカンパニーとしてこの協議会にて推進を進め、このロードマップを基軸に、官民足並みそろえて事業・技術の開発をしています。
有人機「空飛ぶクルマ」SD-XX(コンセプトモデル)

世界最小でDoor to Doorの移動が可能なモビリティ。特徴は以下の通りです。
- 自動車同様のコンパクトサイズ
- 駐車場や離発着場所がコンパクト
- 飛ぶだけでなく走行も可能
- 自立制御技術で運転が簡単、将来は自動運転へ
- 電動化と量産化で低コストを実現
技術特徴として、飛行ユニットの仕組み「二重反転ローター」があります。弊社はプロペラを二重反転とし、8枚のプロペラを前後左右の4箇所に留めることにより、世界最小クラスの機体サイズでありながら、十分な揚力を得ることを目指して開発を進めています。機体名は、SkyDriveの頭文字をとって「SD」、続く数字は開発の通し番号です。よって、コンセプトモデルの機体は「SD
-XX」と記しています。
事業の具体的なサービスの一例としては、空飛ぶクルマによるエアタクシー事業を計画しております。既存の航空機を利用する場合はエアポートまで行くまでの移動時間がとられます。弊社の空飛ぶクルマは、既存の航空機より軽量/コンパクト/静音なため、多くの方がより利便性が高い場所にエアポートを新たに設置できる事が特徴です。この計画は官民一体となり進めております。
有人機「空飛ぶクルマ」 大阪で実現へ
日本における有人飛行ルート案を2023年からスタートすべく、安全性の観点から飛行許可を得やすい海上のルートであり、一定の輸送ニーズが見込める東京・大阪の湾岸エリアにおいての実現を検討しており、官民一体となって推進をしております。
サービス開始の2023年度には5-10㎞の飛行距離、現在の交通手段においては早くとも20-40分程度かかるものを、5-10分程度で到着できることを想定し開発を進めております。
また、2020年代後半においてはさらに飛行距離を伸ばし、20~30㎞の距離に拡張することを目指しております。
万博の空を飛ぶ メイドインジャパン エアタクシー第1号!?

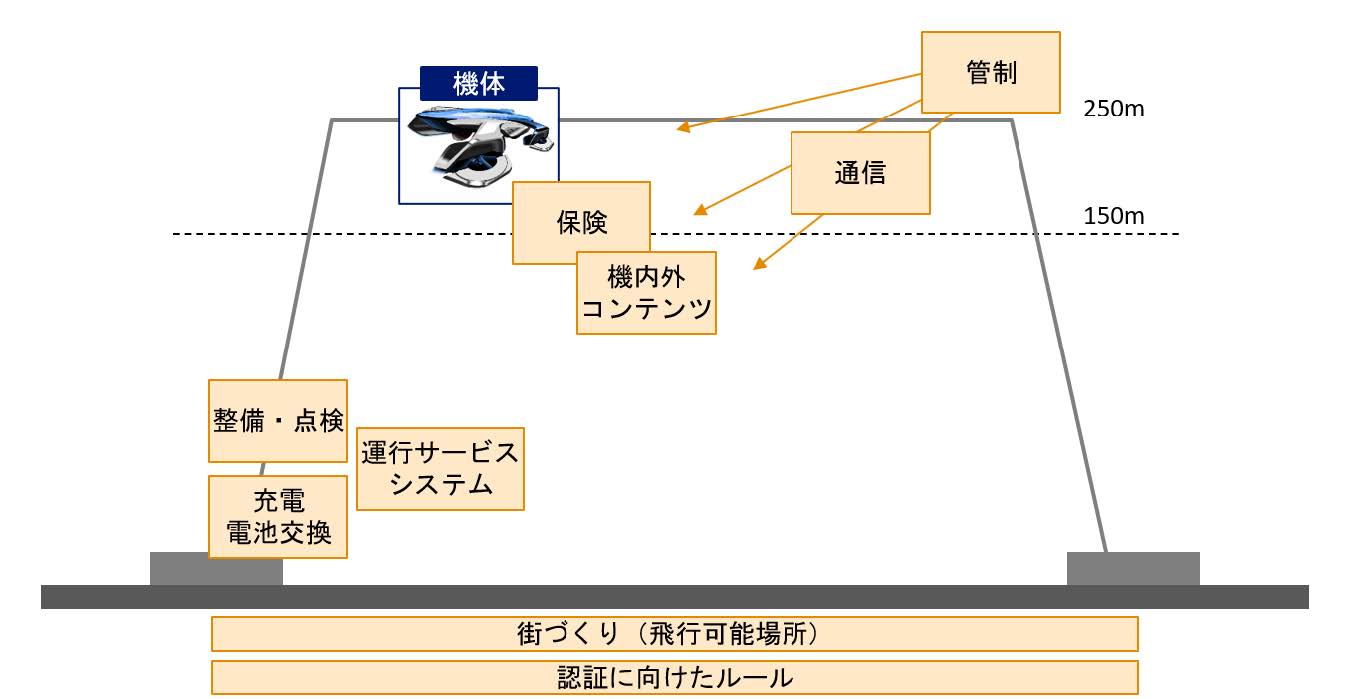
実現に向けて必要な周辺要素の推進
前途に述べた「空の移動革命に向けた官民協議会」においての「空の移動革命」にむけてのロードマップを基軸に、機体や新たな技術の開発、試験飛行、実証実験を進め、同時に「空飛ぶクルマ」の制度や体制を整備してまいります。
飛行高度は第一段階として上空150mを目標に設定し、管制塔からのコントロールをうけながら海上や街中で飛行が実現できる街づくりを協議しております。生活の場に新たなインフラサービスを盛り込むことで、搭乗から到着まで機体サービスがいつでもストレスなく利用できることが特徴です。
また、電気バッテリーで動く機体の充電場所の確保や開発、さらには機体のアフターサービスを充実させることで、日常の身近な移動手段として3次元の空間を生活者に提供する体制を整えてまいります。
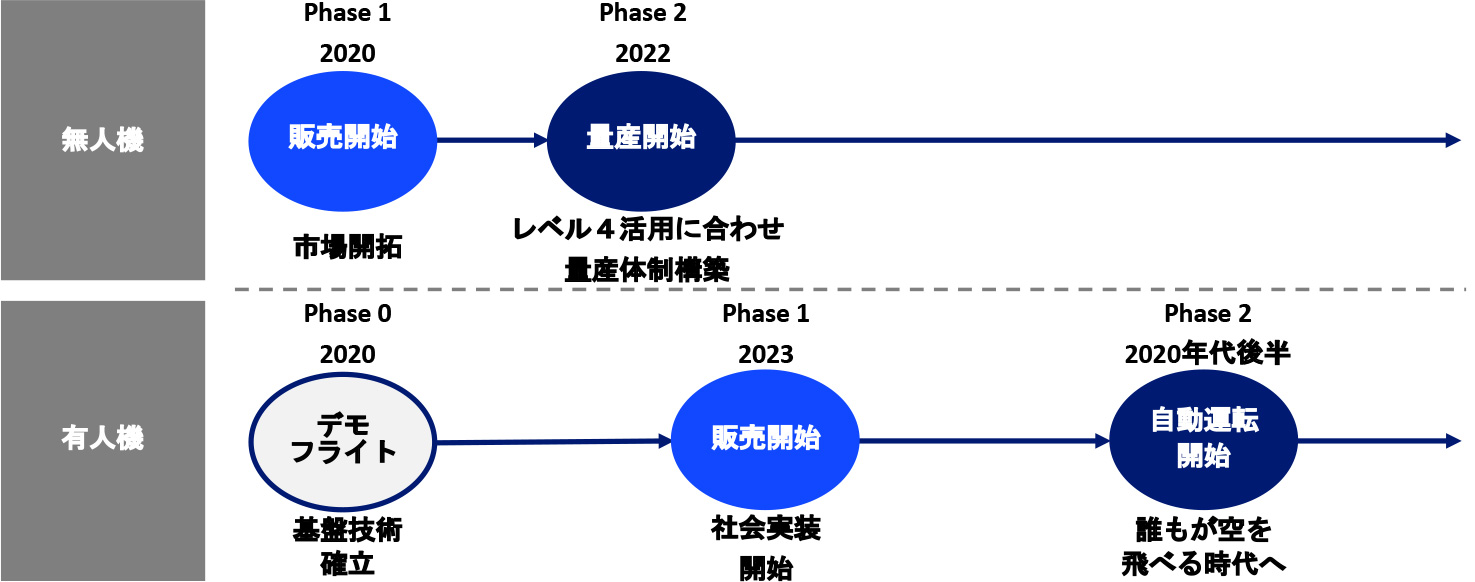
事業化にむけてのマイルストーン
無人機と有人機のコア技術は共通。市場拡大が先行する無人機を着実に進めつつ、得られた知見を有人機に反映していく。