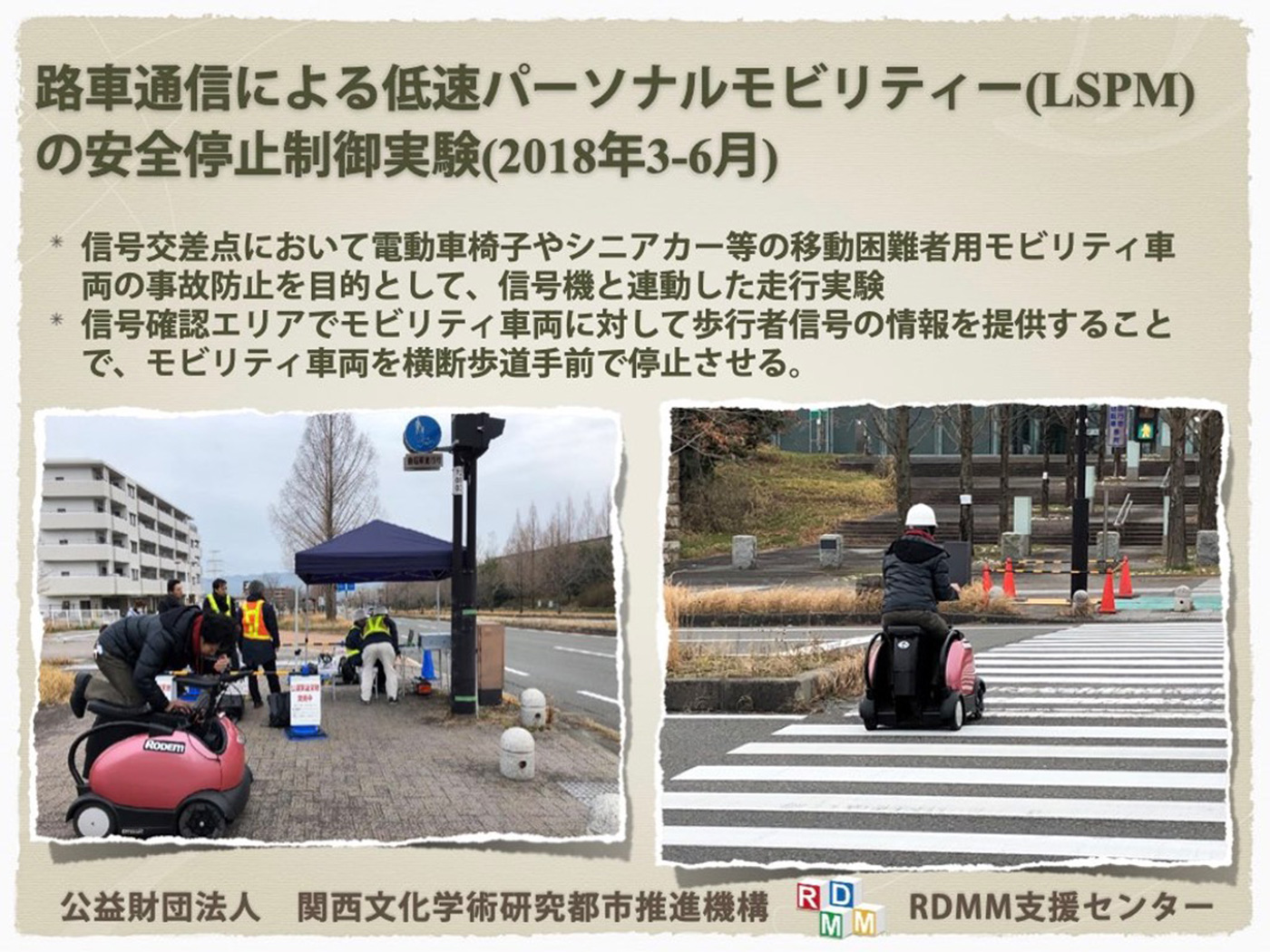
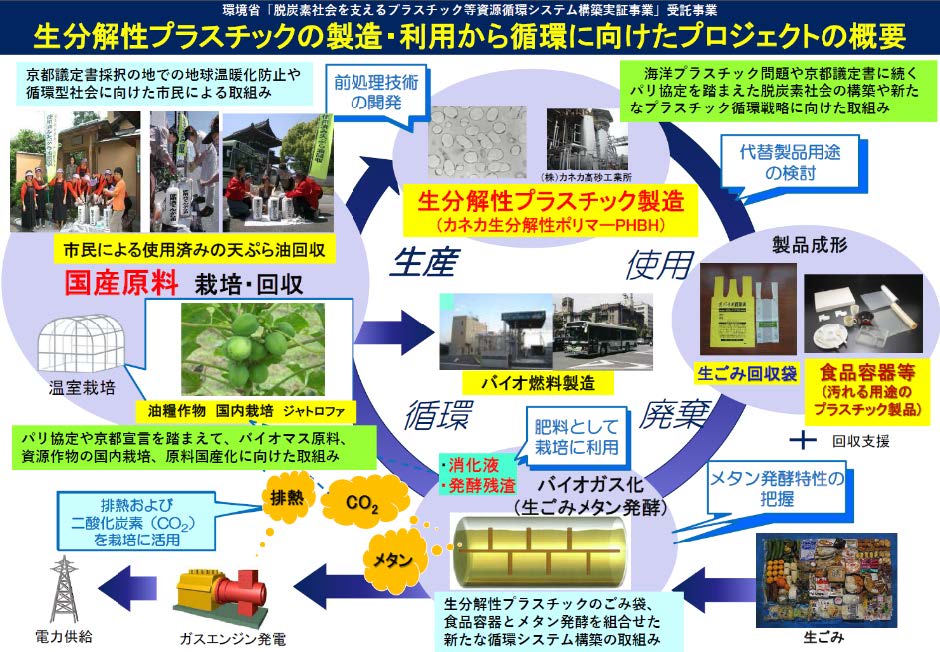
廃食用油(てんぷら油)等を原料とした生分解性プラスチックの 製造・利用から循環に向けたプロジェクトの実施
地域が支える新たなバイオプラスチック循環事業
公益財団法人京都高度 技術研究所
公益財団法人京都高度 技術研究所では、環境省委託事業として廃食用油(てんぷら油)等を原料とした生分解性プラスチックの製造・利用から循環までを含む新たなシステムの構築を目指すプロジェクトを実施します。
脱炭素社会・循環型社会の構築や海洋プラスチック対策の推進に向け、ポリエチレンなどの石油系プラスチックに替え、新たに廃食用油等の国産の循環資源を原料に生分解性プラスチックを製造します。この生分解性プラスチックをごみ袋に利用し、回収した生ごみとともにメタン発酵(バイオガス化)してエネルギーを回収する新たな循環型ごみ処理システムを、ライフサイクルでの環境影響やコスト解析も踏まえて構築することを目指します。
また、生分解性プラスチック原料の将来的な国産化を目指し、市民による廃食用油の回収率の更なる向上に向けた取組みに加え、バイオガス化施設からの排熱、CO2及び消化液を活用し、油糧作物であるジャトロファや菜の花を温室や耕作放棄地などを活用して 加速的に栽培し,廃食用油や資源作物(油脂)など国産原料から,従来の市バスなどへのバ イオ燃料製造・利活用の拡大に加えて、新たに生分解性プラスチックの製造、ごみ袋、汚れる用途の食品容器などへの利用拡大を図り、海洋プラスチック問題や京都議定書に続くパリ協定を踏まえた脱炭素社会に向けた実証プロジェクトを目指します。
カネカ TVCM動画
カネカ PHBH紹介動画
洋ゴミ問題に挑む植物由来の生分解性プラスチック
20世紀のはじめに誕生したプラスチック製品は、軽くて強く、加工も簡単ですが、石油を大量に消費することや、自然界に廃棄物として残り、多くの生物に害を及ぼしてしまうことが、近年大きな問題となっています。これら諸問題の解決に期待されるのが、植物原料由来の生分解性プラスチック「PHBH」です。このプラスチックは、多くの微生物により分解され、使用後は最終的に炭酸ガスと水になります。持続可能な世界を目指す先駆的な存在として、多くの人々のもとに届けられようとしています。